
Ryan Ingham, GIT Coatings, Halifax, Canada, ryan.ingham@gitcoatings.com
Michael Jacot, GIT Coatings, Halifax, Canada, michael.jacot@gitcoatings.com
Philippos Sfiris, GIT Coatings, Athens, Greece, philippos.sfiris@gitcoatings.com
This paper presents a one-year operational case of Proactive Hull Management (PHM). The case focuses on an LPG carrier using a biocide-free hard foul-release coating with onboard robotic grooming. A ship-specific plan was developed through biofouling-risk modelling and port-feasibility assessment. Over twelve months, hull condition and performance were monitored via inspection footage and speed-power analysis. Despite delayed or partial cleanings, the hull remained free of hard fouling and the power trend stayed relatively stable: 6% fuel savings out of dock, <2% added power over the year, and 3-5% fuel savings regained after each grooming event. The study highlights operational learnings related to crew involvement, port practices and the importance of advisory support, and outlines the framework that enabled successful implementation. Findings indicate that PHM, when supported by the right coating, grooming technology and advisory model, offers a scalable, sustainable pathway to meet emerging biofouling management requirements.
1. Introduction
1.1. Three schools of thought in keeping the hull clean
Today, most ship operators have one of three broad approaches to control the growth of biofouling on the hulls of their ships, Fig.1.
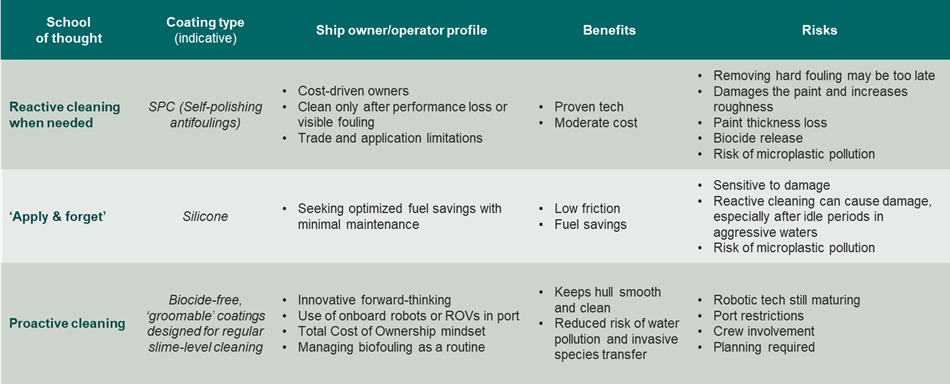
| Fig.1: Three schools of thought for hull management |
1.) Reactive cleaning on self-polishing biocidal coatings
Conventional SPC antifouling coatings are applied at drydock and the hull is left largely unattended until performance loss is detected or visible macrofouling is observed. In practice, macrofouling is usually confirmed only after divers are sent to inspect the hull, following a fuel or speed penalty. Cleaning at that stage is often aggressive and time-pressured, increasing hull roughness, removing film thickness and releasing additional biocides and microplastic particles into the water (Soon, et al., 2024). Hull cleanings of this nature shorten coating life and erode the coating’s original fuel-saving benefit.
2.) “Apply & forget” silicone foul-release systems
Silicone coatings deliver a smooth low friction surface and good fuel performance as long as the coating remains intact. These coatings are attractive for owners who monitor performance and seek optimised fuel savings with minimal maintenance. However, they are relatively soft and not designed for frequent mechanical cleaning. After long idle periods in warm waters, operators may still need to clean. If the cleaning is too harsh, the coating can be damaged locally, shortening life and creating uncertainty about when cleaning helps and when it harms coating performance.
3.) Proactive cleaning with groomable, biocide-free coatings
A third, emerging school of thought uses biocide-free coatings specifically designed for regular slime-level cleaning. Microfouling (FR20) is removed before it develops into more resistant fouling, and hull care is treated as a routine operational task rather than an exception. This approach typically combines “groomable” coatings with onboard robots or in-port ROV services and requires planning, crew involvement, and a mindset that considers the total cost of ownership of the asset.
1.2 Evolving regulations and standards lead to proactive biocide-free solutions
Regulatory and standardisation trends are pushing the industry away from unplanned, reactive cleaning of biocidal coatings and toward proactive, verifiable biofouling management with reduced discharge of toxic chemicals and microplastics to the marine environment.
On the biofouling-management side:
- Revised IMO Biofouling Management Guidelines (MEPC.378(80)) introduce Biofouling Management Plans and Record Books, a standardized Fouling Rating scale (FR 1-5), and a stronger emphasis on underwater hull inspections and in-water cleanings (INTERNATIONAL MARITIME ORGANIZATION, 2023; Scianni et al., 2023).
- MEPC.1/Circ.918 provides guidance on in-water cleaning, defining coating compatibility, capture and environmental safeguards (Tamburri et al., 2022; INTERNATIONAL MARITIME ORGANIZATION, 2025).
- MEPC 83 has agreed to develop a legally binding framework on biofouling management, with adoption targeted before 2030 (LLOYD’S REGISTER, 2025).
- Port and regional authorities (e.g. New Zealand, California, Brazil, Norway, Australia) are already translating IMO and ISO guidance into enforceable rules, often requiring clean-hull entry and restricting cleaning of biocidal coatings to captured operations (Scianni et al., 2023).
On the coating-chemistry side:
- Authorities are tightening control on the use and concentration of antifouling biocides, with several active substances under re-evaluation or phase-out (Paz-Villarraga et al., 2021; Weber et al., 2023; Lagerström et al., 2026).
- The EU Microplastics Restriction under REACH explicitly covers coatings, focusing on the release of synthetic polymer particles over service life (Tamburri et al, 2022; De-la-Torre et al., 2023).
- Mechanical wear and in-water cleaning of polymer-based foul-release and antifouling coatings can generate microplastic particles that enter the marine environment, and their persistence and behaviour are increasingly under scientific and regulatory scrutiny (Bork et al, 2025; Soon, et al., 2024; Tamburri et al, 2022).
In this context, there is growing interest in hull-management models that avoid biocide release, minimize microplastic emissions from coating wear and provide traceable records of inspections and cleanings to satisfy emerging IMO regulations, ISO standards and port requirements. The need for frequent inspection and proactive cleanings via condition monitoring was first addressed in last year’s HullPIC conference proceedings by Jotun’s Hull Skating Solutions (Levantis & Johansen, 2025). The goal of this study is to further advance the understanding of the potential benefits of this concept, while highlighting the elements that differentiate its application across coating technologies and associated implementation framework.
The following sections document a full-year case where such a model was implemented on a commercially trading LPG carrier: a biocide-free graphene-based hard foul-release coating combined with proactive robotic grooming and an advisory-led methodology provided by GIT Coatings.
2. Proactive Hull Management (PHM) Methodology
GIT Coatings’ PHM methodology is structured as a 10-step process that links data-driven planning, grooming feasibility, technology selection and in-service support into a single end-to-end hull management system. The main goal of this methodology is to provide vessel owners, managers, and operators with the proper framework and tools to maintain an optimal hull condition over the drydock interval. This methodology is introduced prior to the vessel’s drydock so that the appropriate stakeholders can be informed on what is expected of them once the vessel launches and resumes its commercial trade.
- Biofouling risk assessment: An overview of the vessel’s historical trading pattern over the previous 12 months in service is analyzed to determine the biofouling exposure and the likelihood of fouling development over time.
- Recommended grooming plan: A custom-tailored grooming plan is developed based on an in-house fouling prediction model that uses the biofouling risk profile derived from the vessel’s historical trading pattern. In this model, biofouling is represented as a single level 𝐵(𝑡) that changes over time based on where the vessel’s trading region and activity level. AIS data provides position and speed at time 𝑡; the position and time are used to look up local ocean conditions 𝐸(𝑡) (for example sea water temperature, salinity, and biofouling productivity proxies). In practice, increases under environmentally favourable conditions and decreases toward zero during sustained transit speeds. Model parameters are chosen using literature guidance and then calibrated using real vessel histories by setting 𝐵(𝑡)=0 at documented full hull cleanings and tuning the model so its predicted levels align with subsequent underwater inspection observations. The result is a predictive tool that can be run forward using a planned route when available or using recent historical trading patterns when the future route is unknown.
Definitions:
B(t+∆t)=max(0,B(t)+G(E(t),v(t))),∆t=1 hour
𝐵(𝑡): biofouling level at time 𝑡
E(t): local ocean conditions at time 𝑡
v(t): vessel speed /activity status at time 𝑡
G(E(t),v(t)): fouling growth added during time step , computed from ocean conditions and vessel speed/activity
E(t) and vessel speed/activity v(t)
max(0,): prevents the fouling level from going below zero
The model estimates when the hull reaches a grooming threshold corresponding to Fouling Rating FR20 (light slime) on both the Vertical sides (VS) and Flat bottom (FB) areas independently.
The FR20 grooming threshold was chosen because:
- It is the point where drag penalties begin to be significant in fuel terms.
- Fouling is still soft and can be removed with one gentle pass, limiting cleaning time and coating wear.
- It aligns with the recommendation in the IMO 2023 Biofouling Guidelines
The grooming plan recommends the frequency (in months) for the vertical side and flat bottom hull areas to be groomed to maintain cleanliness at or below the FR 1 / NSTM FR 20 level.
3.) Grooming model: Based on the vessel’s criteria (vessel size, speed, time in port, etc.) the appropriate grooming model is recommended by GIT’s advisory team to support the vessel’s ability to follow the recommended grooming plan. The selection is made from three main types of grooming models:
- Model A: onboard robotic grooming operated by the vessel’s crewModel B: in-port grooming by ROV or diving services company
- Model B: in-port grooming by ROV or diving services company
- Model C: in-transit grooming of the vertical sides and in-port grooming of the flat bottom and niche areas
4.) Feasibility assessment of grooming plan: Once the grooming plan is developed along with the method for which the recommended grooming events will be carried out, a feasibility assessment is conducted to determine if the vessel would have been able to execute each grooming event throughout its previous 12 months in service. Port regulations and time in port are evaluated, and the vessel receives a feasibility score that aims to give the vessel’s owner confidence that the vessel’s trade allows for PHM.
5.) Selection of grooming technology: The vessel owner can choose from a list of available grooming technologies that fit the selected grooming model. These technologies have been verified as compatible with GIT’s coating by a class society. This class society has reviewed compatibility testing provided by GIT and the technology provider to ensure that there is minimal impact on the coating’s surface properties after repeated grooming cycles with the selected cleaning equipment.
6.) Total cost of ownership and payback analysis: The PHM approach with GIT’s high-performance antifouling coating XGIT-Fuel is compared against alternative methods of antifouling control (SPC, High Tier SPC, Silicone Foul Release, etc.) in a simulation of added resistance/power over the duration of the vessel’s drydock cycle. The total cost of ownership is forecasted using estimates for coating cost, drydock cost, fuel cost and cleaning costs to determine the predicted return on investment and payback period.
7.) Documentation for port authorities: Ports often require detailed information on the coating technology and grooming technology prior to issuing approval for a grooming event to occur in their local waters. The GIT advisory team works with the cleaning provider and the vessel’s captain to ensure the port receives all documentation required for approval.
8.) Fouling warnings: The vessel’s biofouling risk is continuously monitored over the drydock interval and fouling warnings are issued to the vessel if the predicted biofouling risk surpasses that of FR20 and or if the risk does not align with the original grooming plan. These fouling warnings signify the need for an underwater inspection at the next available port or anchorage to understand the hull’s condition and then a decision on the need to perform a hull grooming event can be made based on inspection findings.
9.) Analysis of inspection and performance data: The GIT advisory team works closely with the cleaning provider to ensure all underwater footage is stored and analyzed accordingly. The team will provide timely feedback on the coating condition and if there is a need to update the recommended grooming plan. Performance data is also reviewed periodically to check if the current hull condition matches the expected hull performance of the vessel over time.
10.) In-service hull grooming advisory: This service aims to assist the vessel in making informed decisions on where and when to perform a hull grooming event in the case of port restrictions, excess idle time, or ROV breakdown. The end goal of this service is to ensure that the vessel can employ PHM even if unforeseen complications arise throughout the drydock interval.
In summary, the PHM methodology defines how proactive hull management should work in principle for any vessel. The next sections show how it was applied in practice to a specific LPG carrier.
3. PHM Implementation on an LPG Carrier – Pre docking analysis
For the purposes of this paper, the case study focuses on selected elements of the 10-step PHM methodology: pre-docking biofouling risk assessment, the ship-specific grooming plan and feasibility assessment, and the in-service execution and performance results. Before the vessel left drydock, a ship-specific PHM plan was developed based on its historical trading pattern and fouling-risk profile. The vessel is a 120m LPG carrier and was trading mainly in the Mediterranean Sea and Black Sea prior to drydock coating application.
3.1 Assessment of biofouling risk based on vessel’s historical trading pattern
Analysis of the previous 12 months showed roughly 40% activity (time at sea) and approximately 225 idle days, many of them in warm water ports and anchorages. Using internally developed tools, the trade data (speed profile, idle periods, water temperature and salinity) were processed into a biofouling risk assessment, Fig.2. The vessel’s pattern places it firmly in the high to extreme exposure range, with frequent stops in warm, nutrient-rich waters and long idle periods in high-risk fouling zones. Without early maintenance, fouling would be expected to grow quickly on such a profile, making the vessel an ideal and demanding candidate for proactive hull management.
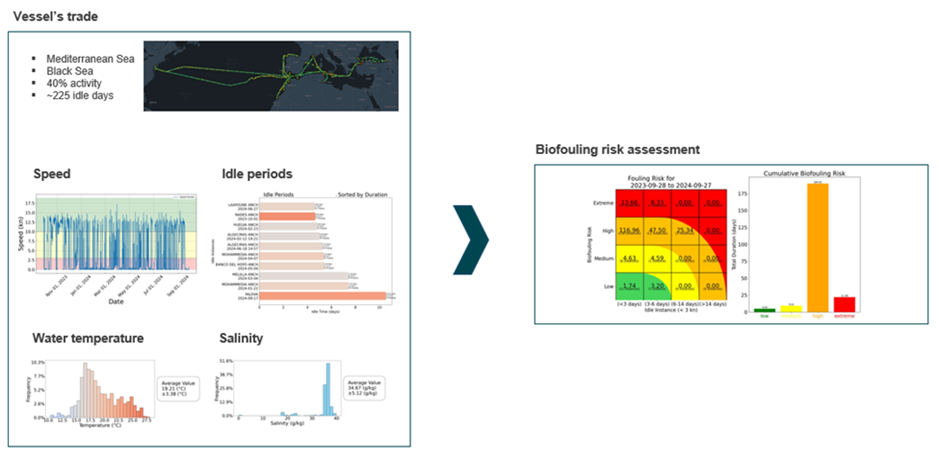
| Fig.2: Vessel’s historical trade and biofouling risk assessment |
3.2 Ship-specific grooming plan based on biofouling growth modelling
Once the biofouling risk was quantified, a biofouling growth model was used to simulate how quickly microfouling would build up on the LPG carrier under its expected trade, Fig.3.
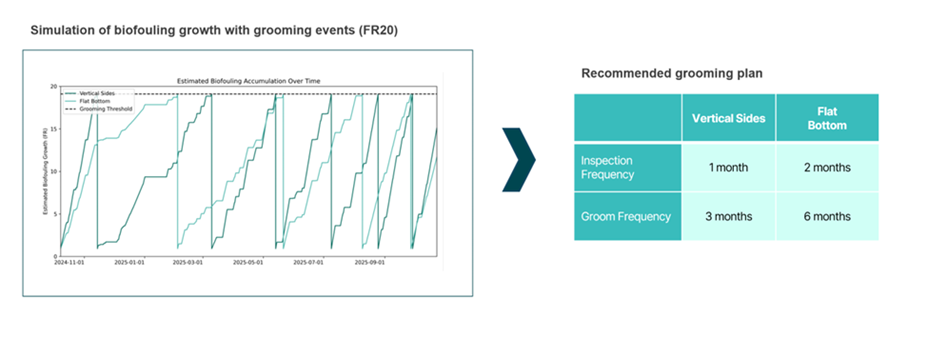
| Fig.3: Vessel simulation of biofouling growth over time and recommended grooming plan. |
From the biofouling growth model, a ship-specific grooming plan was defined for the LPG carrier based on its historical trading pattern:
- Vertical sides
- Inspection every ~30 days.
- Grooming approximately every ~90 days.
- Flat bottom
- Inspection every ~60 days.
- Grooming approximately every ~180 days.
These intervals formed the backbone of the PHM plan and were used to identify when, and in which trading regions the grooming events would need to be scheduled.
3.3 Grooming feasibility assessment (port analysis)
To make the ship-specific grooming plan operational, a feasibility assessment was carried out to identify where grooming could be performed with the onboard robot within the planned inspection and grooming intervals. The study focused on three questions for each port and anchorage on the vessel’s typical routes:
- Is in-water grooming/cleaning permitted under local port regulations and terminal rules?
- Is the average time in port sufficient to complete a grooming cycle with the onboard robot (≈6-8 hours per side (based on vessel size) plus deployment and inspection time)?
- Are there nearby ports or anchorages that could serve as alternative grooming locations within the same trading leg?
Using the vessel’s historical AIS data and a database of port-stay durations and in-water cleaning restrictions, each relevant call the vessel made was classified as either:
- Feasible: time and local conditions allow a planned robot deployment within the grooming interval.
- Not feasible: either too little time or in-water work is not permitted for the onboard system.
The outcome was a port-feasibility map linking the FR20-based grooming intervals (Section 3.2) to ports and anchorage locations where the plan could be executed with the robot onboard. For the legs in the Mediterranean Sea and Black Sea, at least one “anchor port” fell within each three-month window, meaning that a grooming opportunity was available before the hull was expected to reach the FR20 threshold.
In parallel, the same map recorded the presence of approved in-port cleaning providers as a contingency plan, Fig.4. Where feasible ports also hosted these service providers, they were marked as backup options in case the onboard robot became temporarily unavailable or if local rules required a provider to perform the work.
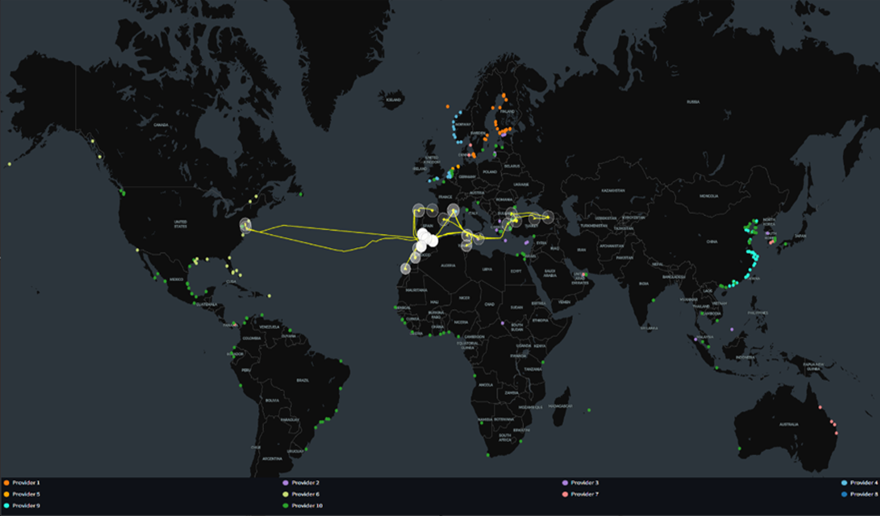
| Fig.4: Map of global ports for which hull grooming is feasible by various providers. |
3.4 Selection of grooming method
Different grooming methods were evaluated to help the owner decide how grooming events should be performed in practice:
- Model A: Onboard robot operated by crew.
- Best suited for vessels up to around 150 m LOA, with predictable idle periods where the crew can deploy and recover the robot effectively.
- Model B: In-port ROV service.
- Using local approved service providers that bring their own equipment to the vessel in port. Suitable where onboard robots are restricted, where LOA is large, or where crew resources are limited.
- Model C: Grooming in transit.
- Tools operated during ocean legs, suited to high-speed, long-haul trades where in-port cleaning windows are scarce.
For this LPG carrier, Model A was chosen as the primary method:
- Vessel size allows full-hull coverage in reasonable time.
- The owner was prepared to train a small deck team to operate the robot.
- Idle periods in anchorages and ports create natural windows for grooming.
At the same time, Model B was retained as a structured back-up method:
- To treat niche areas (bilge keels, sea chests, complex geometries) that may be less accessible to the robot.
- To provide contingency if the onboard robot is temporarily unavailable or if local rules restrict its use in specific ports.
Model C was not considered to be a primary option due to the vessel’s typical service speeds and the need to proactively clean the flat bottom every 6 months.
3.5 Proposed solution: Biocide-free graphene-based coating and grooming robot onboard
Given the high fouling risk and the owner’s decarbonization ambitions, the proposed solution was to apply GIT’s biocide-free graphene-based hard foul-release coating (XGIT-Fuel) paired with an onboard hull-grooming robot.
The onboard grooming system is a semi-autonomous magnetic crawler with soft brushes. It can map the hull and record fouling coverage, perform inspection passes and remove slime-level fouling in a single light pass. For this vessel size, experience shows that once mapping is completed, a full grooming cycle requires roughly 6-8 hours per side of vertical hull, plus shorter periods for deployment, post-inspection and reporting.
Together, the coating and robot form a simple but disruptive combination: a durable, low-friction surface engineered for frequent light cleaning, and a tool that allows crew to remove early-stage slime before it can become more persistent fouling.
After the first year in service, the feasibility assessment was compared with the vessel’s actual trade and grooming history. All three grooming events, as well as the inspections that informed scheduling decisions, were carried out in ports and anchorages that had been pre-classified as feasible locations in the study. This alignment indicates that the pre-docking feasibility assessment correctly identified where grooming could be performed within the planned intervals, with the approved cleaning partners available if needed as contingency.
Having established the plan, technology and feasibility before leaving drydock, the next step is to see how PHM performed once the LPG carrier returned to commercial service.
4.0 PHM Implementation on an LPG Carrier – Execution & monitoring
4.1 In-service monitoring & advisory support
Once in service, the PHM plan was managed as a live process rather than a static grooming schedule. GIT’s advisory team supported the operator through:
- Inspection footage reviews after each robot deployment to ensure there is no signs of macrofouling
- Fouling warnings triggered once predicted growth levels exceeded FR20 (typically due to long idle periods in high-risk waters).
- Monthly performance reports which combined performance insights from high-quality noon reports with inspection and grooming logs.
- Recommendations on when and where to groom next, based on the grooming plan, feasibility map and future port calls.
- Documentation material for port approvals, including XGIT-Fuel’s enhanced antifouling type approval from a class society and the vessel’s biofouling management plan.
Regular three-way communication between the owner, the robot supplier and GIT’s team allowed the plan to be adjusted when planned grooming windows were missed or shortened, robot technical issues delayed a cleaning, port regulations or operational constraints changed at short notice.
4.2 Operational timeline – cleaning events
During the first 12 months after drydock, the vessel completed:
- 7 underwater inspections.
- 3 grooming events using the onboard robot, targeting full-hull coverage where time allowed.
The operational timeline, Fig.5, shows the vessel’s actual inspection/grooming schedule over the first 12 months.
- The robot was launched immediately after drydock, and the vessel’s crew were trained on how to deploy and recover it.
- The first hull grooming event brought the hull back to a clean condition after initial development of a slime layer, confirming that the coating tolerated microfouling removal without visible damage from the type of cleaning equipment used.
- Subsequent grooming events were affected by typical commercial realities including tight port schedules, time-sharing with cargo operations, and occasional robot reliability issues. This led to partial cleanings (e.g. one vertical side only) and delayed cleanings relative to the intended FR20 thresholds
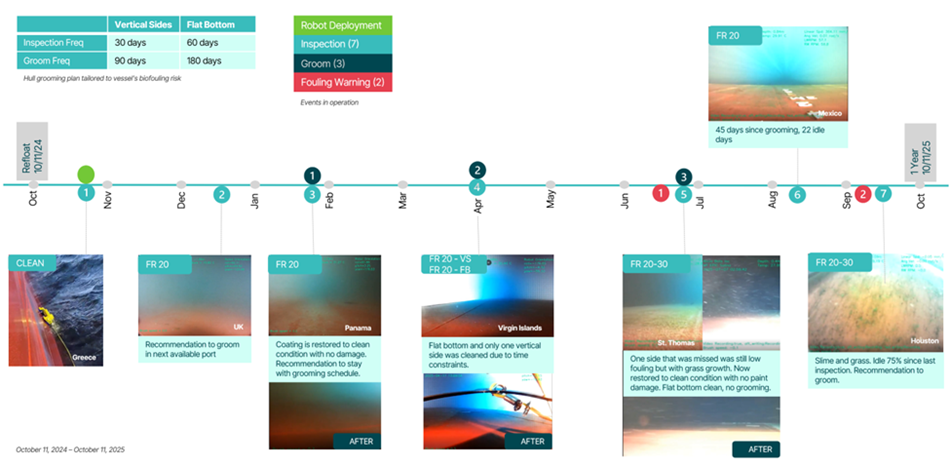
| Fig.5: Operational timeline of events for the LPG Carrier’s first year in-service. |
Despite these challenges, GIT’s advisory team continued to issue fouling warnings and updated grooming recommendations based on the actual trade. Each completed grooming successfully restored the treated areas to a clean condition.
Video footage from inspections and grooming events provided a consistent picture of the hull condition over the year:
- The hull remained at FR ≤ 20 (slime only) for most of the period.
- When grooming was delayed, local grass growth appeared on one side and in some niche areas but was removed at the next cleaning without apparent damage to the coating.
- No hard fouling was recorded on the underwater hull.
- No coating detachment, blistering or visible roughening was observed after multiple grooming events.
These observations support the conclusion that the graphene-based coating maintained its smoothness and integrity under repeated grooming events at the slime-stage.
In addition to this visual evidence of hull condition, quantitative analysis of speed-power performance was carried out to understand how PHM affected fuel efficiency over the first year in service.
4.3 Hull performance evaluation
The vessel’s hull performance was evaluated based on high quality noon report data that was collected by the vessel owner. Once received, the data was cleaned and the shaft power was normalized to an average sailing speed of 12 knots in good weather conditions (BF wind force rating 4). Using this normalized dataset, a baseline hull performance was established for laden condition to represent a clean hull. The changes in hull performance were then quantified before and after each inspection and hull grooming event as denoted by the vertical-coloured lines in Fig.6.
This performance assessment aims to quantify the discrete impact of hull grooming events under representative commercial operating conditions. While ISO 19030 provides a standardized framework for long-term hull and propeller performance monitoring, the objective of this approach was to isolate and evaluate the short-term performance changes attributable to individual grooming interventions over a smaller time frame. It should be noted that the uncertainty associated with this approach is expected to be higher than that of the ISO 19030-2 default method. The primary driver is measurement frequency, as noon report data provides one aggregated data point per day, whereas ISO 19030-2 typically relies on high-frequency measurements at intervals of ~15 seconds. Reduced measurement frequency increases statistical variability and limits the ability to average out short-term fluctuations. For context, ISO 19030-3-3 estimates a performance indicator uncertainty of approximately 4.8 percent at a 2 sigma, 95 percent confidence interval when comparing two 3-month in-service periods. The uncertainty associated with this event-centered approach using noon reports is therefore expected to be of similar order due to the cluster size and environmental variability of the vessel’s daily operations.
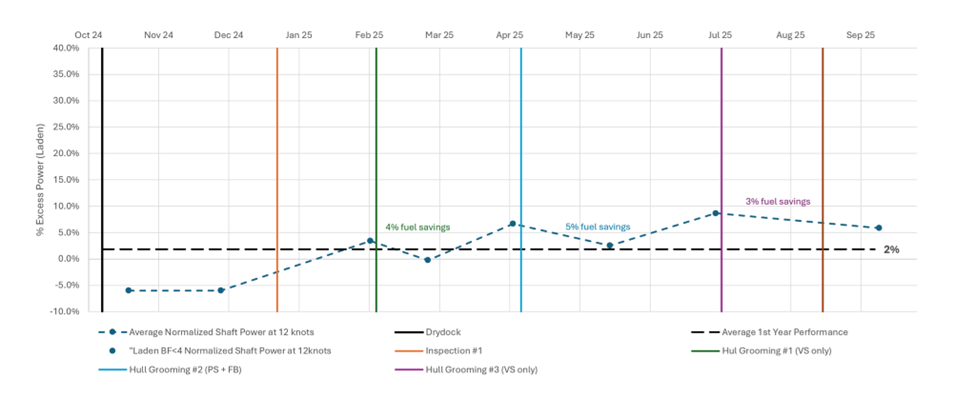
| Fig.6: % Excess Power over time trend for the LPG Carrier in Laden condition |
Key findings:
- A 6% power gain out of dock compared to the vessel’s previous high-tier SPC antifouling, under comparable trading conditions. The gain is attributed mainly to lower roughness and frictional resistance which has been previously tested and validated in a fully turbulent flow channel experiment (Ravenna et al., 2022).
- Only ~2% added power over the first year, despite ≈180 idle days in extreme fouling exposure. The power trend remained relatively stable.
- Average of ~4% fuel saving regained after each grooming (3-5% range), measured as the reduction in excess power immediately after grooming vs pre-grooming. This indicates the value of timely removal of slime-level fouling.
To put these results in context, the data were compared with two simplified theoretical curves, Fig.7:
- An ideal proactive grooming model, assuming full-hull, on-time grooming at FR20 with no operational constraints.
- A typical high-tier SPC antifouling baseline, with no in-water cleaning in year one but its hull roughness increases by ~200 microns per year due to dry film thickness loss and early-stage microfouling development over time.
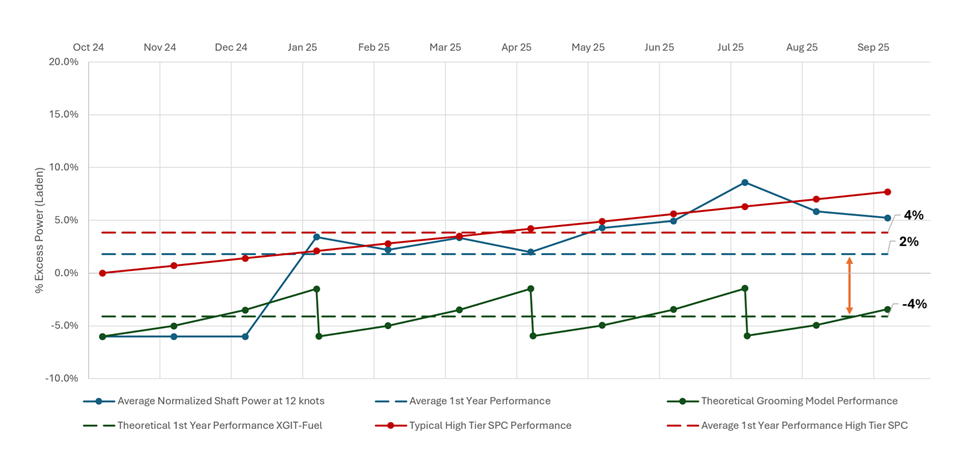
| Fig.7: % Excess Power over time trend for the LPG Carrier (theoretical vs. practical scenarios). |
The actual performance of the coating-plus-grooming bundle sits between these two curves but closer to the ideal proactive model:
- Even with partial and delayed cleanings, the vessel delivered around 2% better annual performance than the high-tier SPC baseline in the same trade and fouling exposure.
- The modelling indicates up to an additional 6% in annual efficiency potential is attainable if the performed grooming events can move closer to the ideal schedule through better planning, wider port coverage, consistent full-hull grooming and remote operation with skilled personnel.
5.0 PHM Implementation on an LPG Carrier – Key learnings and challenges
After one year of operation, several clear lessons emerge from this case study:
1. It can be done.
A biocide-free graphene-based hard foul-release coating combined with proactive grooming and advisory support kept an LPG carrier’s hull clean in day-to-day commercial trade, under high fouling pressure and with real-world operational constraints. No hard fouling developed, coating integrity was preserved, and hull performance stayed close to the “as-docked” levels.
2. It can perform better than the conventional alternative.
Even with non-ideal execution, this approach outperformed a theoretical high-tier SPC baseline, and there is still measurable upside if the PHM execution is optimised.
3. It requires a managed program, not just a coating.
Success depended on the combination of:
- Trade-based biofouling risk assessment and FR20 grooming thresholds.
- A port-feasibility assessment that proved realistic when checked against actual trade and provider availability.
- In-service monitoring and monthly reviews that kept everyone aligned and allowed the plan to be adjusted as reality evolved.
- Coating chemistry and robotics were necessary but not sufficient; the advisory framework was essential.
4. People and collaboration matter.
As crew confidence with the robot increased, coverage and consistency improved. Close collaboration between the owner, robot supplier and GIT’s advisory team enabled quick resolution of early technical issues and supported decision-making on when and where to groom.
5. There is still room to optimize.
The first year highlighted clear improvement areas:
- The importance of trade route identification – Spot charter trade is unpredictable and does not allow for future planning of grooming events since the future port calls are typically not known in advance. Whereas time-chartered vessels have scheduled routes and are better suited with respect to the applicability of PHM.
- Some ports do not allow hull grooming to be done using the hull grooming robot while in inner anchorage areas even if the vessel explains that the hull coating is biocide-free and the previous month’s inspection report shows that hull is almost clean and only slime removal is needed.
- There is a need to educate port states and other port control authorities on the PHM concept and that it entails regularly schedule grooming that targets early stage microfouling on a biocide-free coating that is designed to be cleaned. There also needs to be clear messaging that hull grooming robots carried on board are not to be confused with underwater free-floating drones, since the grooming robot should always remain attached to the hull.
- Broader port coverage and approved service partners to complement onboard robots and cover niche areas.
- Consistent full hull grooming is achieved for each event, whenever time and conditions permit.
- Remote robot operation to reduce crew workload and standardise cleaning quality.
- Further refinement of the grooming feasibility model, leveraging additional trade with good sailing days and long-term performance data.
- Future work will benefit from increased measurement frequency through direct sensor integration, enabling improved noise reduction, tighter confidence intervals, and formal uncertainty propagation aligned with ISO standard methodologies.
Overall, the first-year operation of the LPG carrier demonstrated that a proactive, biocide-free hull-management model is no longer a theoretical concept. With the right planning, feasibility assessment and in-service support, it can work and already delivers better performance and environmental outcomes than some conventional approaches.
Acknowledgement
The authors wish to thank the reviewers of this paper for their thoughtful feedback and constructive suggestions, which helped improve its quality and content. The authors also gratefully acknowledge the vessel owner for providing the candidate vessel and implementing GIT’s proactive hull management methodology, as well as the robotic grooming supplier for supplying the ROV onboard, supporting crew training, and providing technical assistance during operations.
References
BORK, K.; NIELSEN, M.; DAM-JOHANSEN, K. (2025), Microplastics released from antifouling coatings: Comparison of coating types under realistic wear, Int. Antifouling Conf., pp.112-119
INTERNATIONAL MARITIME ORGANIZATION (2023), Guidelines for the control and management of ships’ biofouling to minimize the transfer of invasive aquatic species (MEPC.378(80)), IMO, London,
INTERNATIONAL MARITIME ORGANIZATION (2025), Guidance on in-water cleaning of ships’ biofouling (MEPC.1/Circ.918), IMO, London,
LAGERSTRÖM, M.; GRANHAG, L.; YTREBERG, E. (2026), Impact of antifouling paint regulation on copper and zinc emissions from leisure boats, Marine Pollution Bulletin 191, 115007
LEVANTIS, M.; JOHANSEN, M.S. (2025), Proactive Cleaning: Leveraging Data for a Successful Beginning, HullPIC2025 Conference Proceedings, pp.184–194,
http://data.hullpic.info/HullPIC2025_Mulheim.pdf
LLOYD’S REGISTER (2025), MEPC 83 summary report, Lloyd’s Register, https://maritime.lr.org/MEPC-83-Summary-Report
PAZ-VILLARRAGA, C.; MUÑOZ-BRAVO, J.; ESPINOSA, A. (2021), Biocides in antifouling paint formulations currently registered for use, Environmental Science and Pollution Research 28, pp.50825-50842
RAVENNA, R.; INGHAM, R.; SONG, S.; JOHNSTON, C.; TEZDOGAN, T.; ATLAR, M.; DEMIREL, Y.K. (2022), Predicting the effect of hull roughness on ship resistance using a fully turbulent flow channel, Journal of Marine Science and Engineering 10 (12)
SCIANNI, C.; GEORGIADES, E.; MIHAYLOVA, R.; TAMBURRI, M.N. (2023), Balancing the consequences of in-water cleaning of biofouling to improve ship efficiency and reduce biosecurity risk, Frontiers in Marine Science 10, 1239723
SOON, Z.Y.; TAMBURRI, M.N.; KIM, T.; KIM, M. (2024), Estimating total microplastic loads to the marine environment as a result of ship biofouling in-water cleaning, Frontiers in Marine Science 11, 1502000, https://doi.org/10.3389/fmars.2024.1502000
TAMBURRI, M.N.; GEORGIADES, E.; SCIANNI, C.; MOSER, C.S. (2022), Understanding the potential release of microplastics from antifouling coatings, Frontiers in Marine Science 9, 1074654
WEBER, S.; KINNER, P.; ROSSHART, C.; ROSENHAHN, A. (2023), Marine biofouling and the role of biocidal coatings: Regulation driven innovation, Biofouling 39, pp.739-754